Referenzen
Schauen Sie sich hier ein paar unserer Arbeiten an. Bei Fragen zu den Referenzen der Montage- und Automatisierungstechnik Sie uns bitte an: 034297-1436-0
Schauen Sie sich hier ein paar unserer Arbeiten an. Bei Fragen zu den Referenzen der Montage- und Automatisierungstechnik Sie uns bitte an: 034297-1436-0
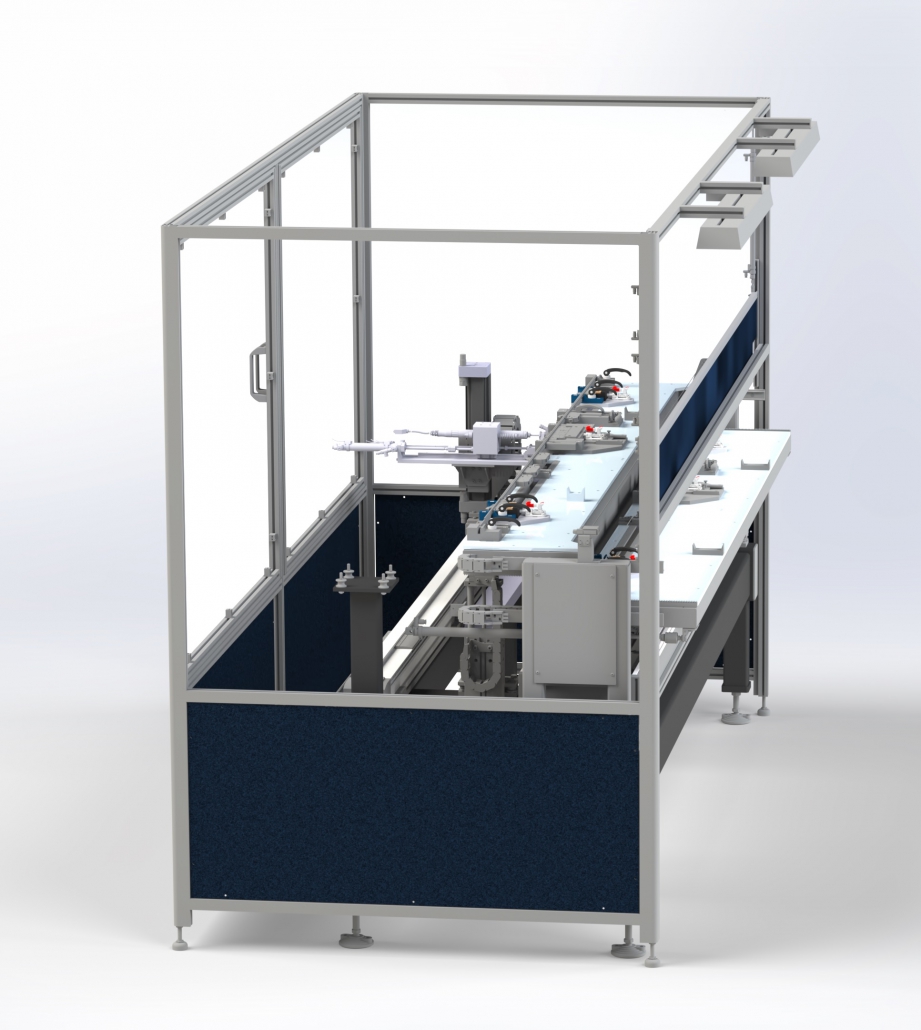
mit Transfersystem für Verkettung:
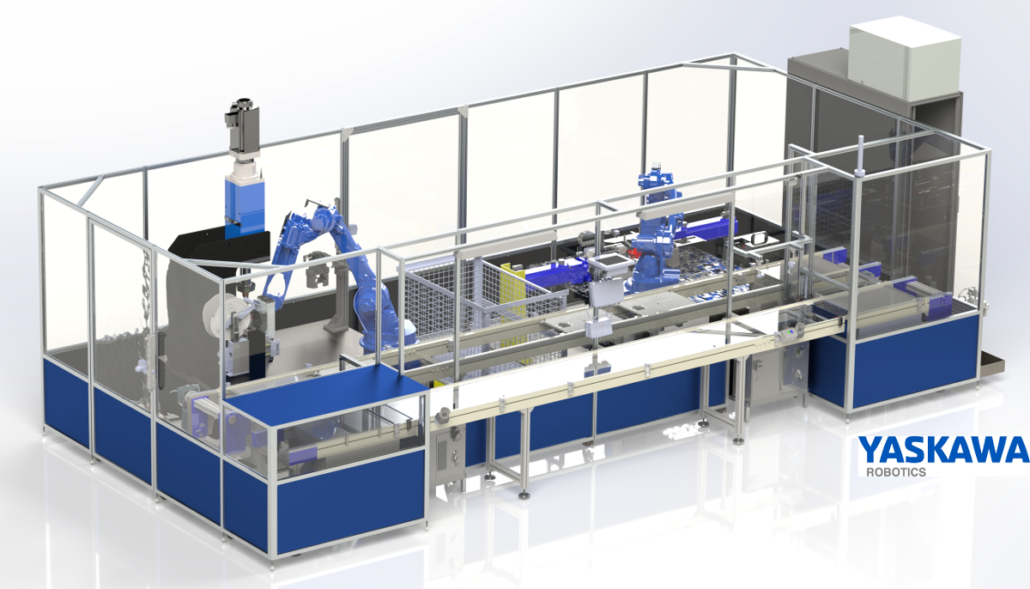
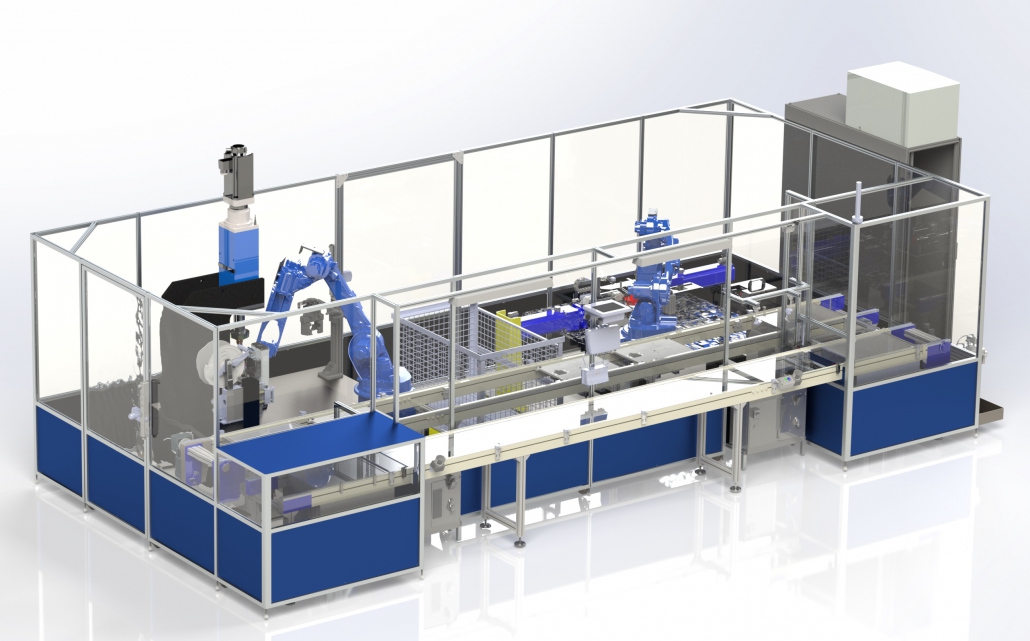
Softwareoberfläche YASKAWA MotoLogix für MOTOMAN Roboter
MotoLogix ist eine Softwareschnittstelle zur Programmierung und Steuerung von MOTOMAN-Robotern per Siemens SIMATIC SPS. Die Bedienung der beiden Yaskawa GP25 6-Achs-Roboter erfolgt über ein Siemens SIMATIC MobilePanel. Weitere Informationen finden Sie unter https://www.yaskawa.de/produkte/software/productdetail/product/motologix_1669
mit Rundschalttisch für Verkettung:
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren

mit Kreuztisch und Schwenkvorrichtung sowie automatischer 2-fach Bauteilzuführung mit Typerkennung mittels industrieller Bildverarbeitung.


mit Rundschalttisch für Verkettung Einlegestation, Messstation, Markierstation mittels Beschriftungslaser und Entnahmestation. Das Bauteilhandling erfolgt dabei mittels Scara-Roboter zur Realisierung einer Verifizierung der Bauteilbeschriftung, einer optischen Prüfung über 360° und einer koordinierten Ablage auf einem Bandsystem zur Verkettung mit einem Folgeprozess.
mit Transfersystem zur Integration in eine Montagelinie. Das Bauteil wird mittels Dreh-Hub-Handling von einem Werkstückträger entnommen und in einem Laserschutzraum mit Doppel-Markierkopf (180°-Anordnung) positioniert für eine mehrfach Beschriftung des Bauteils. Anschließend erfolgt eine Verifizierung der Bauteilbeschriftung.

mit Doppel-Schiebetisch zur wechselseitigen Maschinenbeladung. Mittels Masterteilen können frei positionierbare Bauteilaufnahmen für eine große Typenvarianz gerüstet werden. Auf 2-Ebenen erfolgt anschließend die Bearbeitung von endlich vielen Positionen mittels servomotorisch verfahrbarer Schrauber-Einheit mit automatischer Schraubenzuführung.

mit 2 im Laserschutzraum positionierten Markierköpfen zur Beschriftung mehrerer Bauteiltypen.


{kind=link}
{kind=link}
{kind=link}